Lane Line Tracking
Project Introduction
This is a Lane line tracking algorithm for multifunctional smart logistics trolleys based on Jetson nano, which needs to have various functions including LIDAR map navigation, obstacle avoidance, shortest path planning, and traffic light and lane line recognition. In this project, I realized the UNet-based lane line recognition, and used the coordinates of the points on the lane line for curve fitting, combined with the horizontal offset of the cart from the lane line, to calculate the turning angle needed by the cart so as to realize the cart’s automatic tracking along the lane line. The algorithm finally realizes the stable recognition of the lane line under different lighting conditions and the trajectory at a speed of 1m/s.
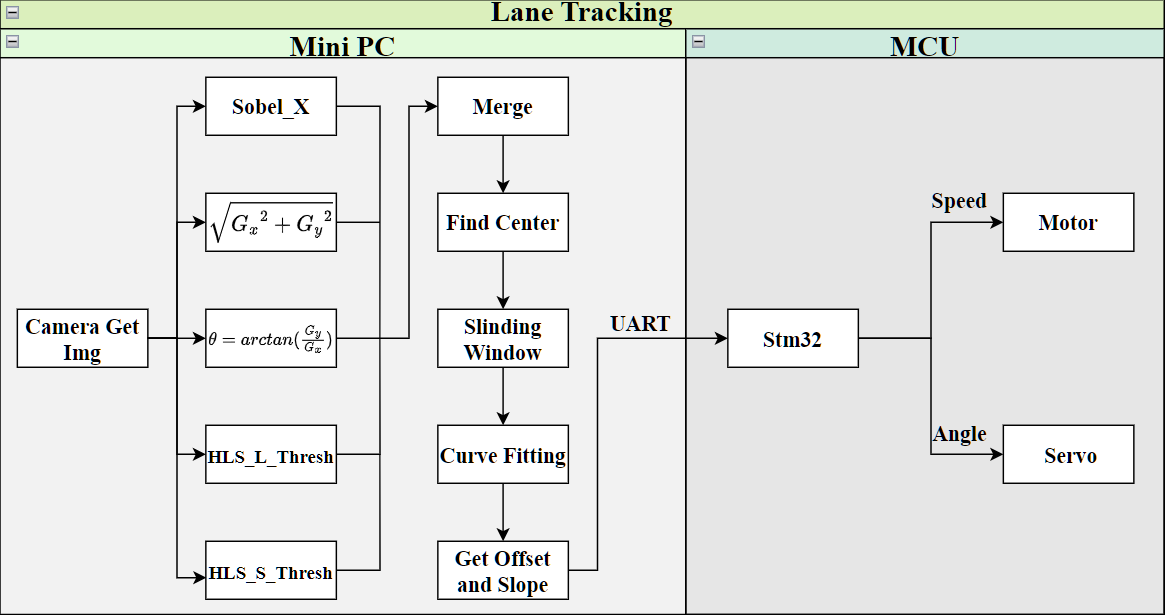
Project WorkFlow
Lane Line Recognition
Two schemes are used for the lane line recognition part, one is a scheme that uses UNet to implement semantic segmentation of lane lines, and the other is a scheme that uses normal image processing algorithms and uses sliding window detection to implement it.
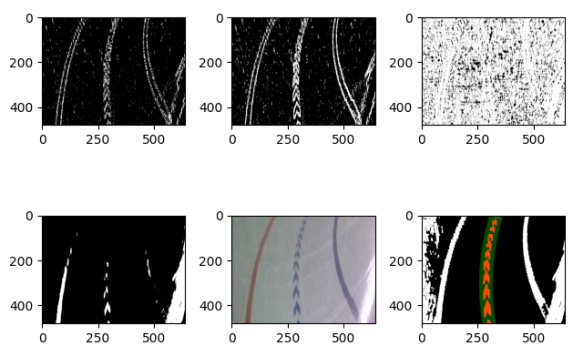
Multi-Feature Fusion Lane Line Recognition :
- Multi-Feature Fusion
- Sobel X
- Gradient information of the X and Y directions
- Gradient direction
- Information of L channel and S channel in HLS space
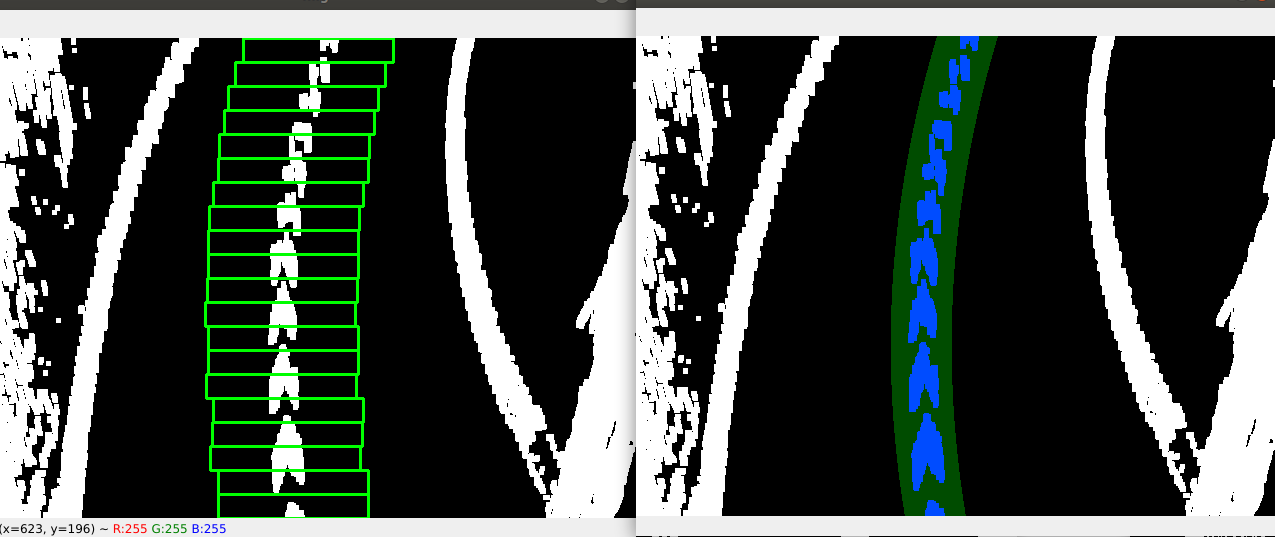
- Slide the window to extract the lane line centerline
- Setting window parameters and sliding range
- Setting the sliding starting point
- Sliding according to the recognized pixel value in the window
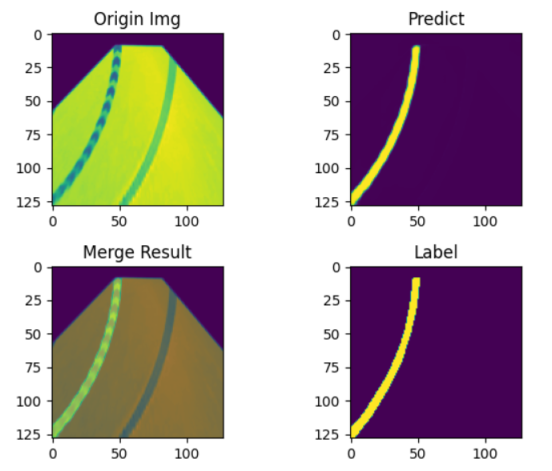
Semantic segmentation based on UNet :
- Label and train using labelme
- Further improve the robustness of the model
- Simplify the steps of repeated parameter setting, which automatics the debugging process.
Lane Line Tracking
- Use curve fitting to get an expression for the lane lines.
- Obtaining the slope of the lane line and calculating the turn angle of the cart by combining it with the cart’s offset from the center.
- Communicate with the host computer to realize control
The complete process of vehicle tracking is as follows: